Android上基于ORB-SLAM2的AR介绍这是一个基于和OpenGL的Android增强现实APP。 演示视频可以在下面的链接中找到。 演示视频依赖关系,安装和使用要运行此APP,您需要将./SLAM文件夹复制到您的手机中,其中包含词汇表...
”android app opengl ar slam orb orb-slam2 OpenGLC “ 的搜索结果

《ORB-SLAM2源码解析》学习手册v1.0-对外.pdf
点击上方“3D视觉工坊”,选择“星标”干货第一时间送达作者丨小深来源丨深话AI本文总结了特征点法SLAM中目前效果最好的方法:ORB-SLAM2 / ORB-SLAM3 相关改进代码汇总,...
SLAM_基于ORB-SLAM2+OpenGL在Android平台上实现的增强现实APP应用_可适用于室外+室内场景_优质项目实战
东北大学吴博讲解ORB_SLAM的文档,仅有文档。


文章参考部分开源代码和报错文章。

介绍ORB-SLAM、ORB-SLAM2和ORB-SLAM3的一些特点,汇总3个ORB-SLAM的论文和github地址。最后选择ORB-SLAM2进行安装测试。
ORB-SLAM2-VINS-Fusion GitHub链接:https://github.com/HKUST-Aerial-Robotics/VINS-Fusion/tree/master/orb_slam2。ORB-SLAM2-Map-Merging GitHub链接:https://github.com/Owen-Liuyuxuan/ORB_SLAM2-Map-Merging...

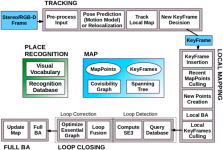
轨迹跟踪的主要目的是估计相机的位姿。先处理每一帧图像,提取ORB特征点,如果尚未初始化地图,则先进行初始化。再根据地图信息和当前机器人运动状态来估计相机位姿或者进行重定位,然后在局部地图中完成轨迹跟踪, ...






ORB-SLAM2运行遇到段错误 解决:将Cmakelist.txt里的 -march=native去掉即可


基于ORB-SLAM2的改进代码
标签: 算法


学完SLAM十四讲 心血来潮想跑一下ORB-SLAM2的代码,纯新手小白,自己的踩坑经历进行整理:本文章主要对ORB-SLAM2进行编译运行遇到的问题和解答。以及自己构建数据集
与ORB-SLAM2相比,ORB-SLAM3在处理大视差和长时间未观测到的场景时效果更好。它还提供了更准确的帧间运动估计和更快的处理速度。此外,ORB-SLAM3还支持更多的传感器,包括RGB-D摄像头和车载LIDAR。ORB-SLAM3的代码...

推荐文章
- Springboot——mybatis配置_springboot配置mybatis-程序员宅基地
- 计算机网络体系结构-程序员宅基地
- 韶音、南卡、Oladance开放式耳机值得买吗?多维度测评实力最强品牌-程序员宅基地
- bert简介_tensorflow 2.0+ 基于BERT的多标签文本分类-程序员宅基地
- jupyter notebook常用快捷键和语法_jupyter notebook怎么换行-程序员宅基地
- 教材编者,请多点儿“钻研”精神-程序员宅基地
- MySQL如何更改数据库名字_mysql update数据库名称-程序员宅基地
- windows上最好用的文件管理软件 Directory Opus_directory ops-程序员宅基地
- AWT图形界面设计编程——1.AWT容器_awt容器定义-程序员宅基地
- 一文看懂mybatis底层运行原理解析-程序员宅基地